Robotic Leaf Detection And Extraction System
Patent Status
| Country | Type | Number | Dated | Case |
| United States Of America | Issued Patent | 12,520,772 | 01/13/2026 | 2022-880 |
Full Description
Background:
Agronomists typically use specialized equipment in the laboratory to analyze leaf samples to accurately diagnose plant and tree health. Determining leaf water potential helps them estimate tree stress levels and optimize irrigation. While this has been mostly a manual process some research has been conducted on the use of drones and ground robots.
Autonomous collection of a leaf sample from a tree presents unique challenges in visual perception, actuation and leaf extraction. While computer vision techniques have made significant advances there are significant challenges which impact their real-time application:
- Computational resources and training data sets needed can be significant.
- Can be impacted by occluded and overlapping leaves.
Technology:
Research team led by Prof. Konstantinos Karydis at UCR has developed a robotic system to autonomously select, cut and retrieve a leaf sample for water potential measurement and analysis. The developed system includes a visual perception algorithm and a new end-effector to cleanly cut leaves at their stem and retrieve them. The resulting robotic platform is a 6-degree of freedom robotic arm that automates the leaf retrieval process.
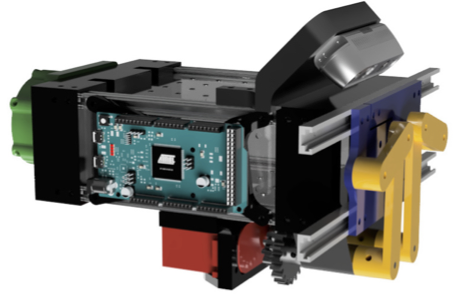
The custom end-effector contains the components necessary to cut a leaf from a tree. The servo motor (red) actuates a double four-bar mechanism (yellow) that closes a set of gates (blue) with a razor blade to cut and capture a leaf. A camera is mounted on the top of the end-effector for perception. A micro-controller is mounted on the arm for controlling the motor. This end-effector can be mounted to a robotic arm using an adaptor plate (green).
Advantages
- Demonstrated robotic platform that can successfully identify, localize, cut and extract leaves.
- Utilizes three key effective steps – end effector path planning, vision-based detection and localization of candidate leaf, and cutting the candidate leaf at the step and retaining it.
- Using 6D-pose of the camera on the robot’s end-effector to determine the position of the leaf.
- The end-effector design reliably severs the stem without damaging the leaf and can work with a wide variety of leaves.
- The end-effector chamber can accommodate most leaves and is lightweight at only 1.09kg.
Suggested uses
- Commercial orchards
- Tree crops such as almonds, citrus, etc.
- Precision agriculture systems to determine tree health based on leaf water potential.
State Of Development
Working prototype of the robot has been built and demonstrated on live Avocado trees. The team is working towards removing the necessity of assuming a fixed angle of attack when approaching the leaf.
Related Technology
Please see all inventions by Prof. Karydis and his team at UCR.
Contact
- Venkata S. Krishnamurty
- venkata.krishnamurty@ucr.edu
- tel: View Phone Number.

Other Information
Keywords
Robotics, Precision Agriculture, Irrigation, Leaf Sampling, Leaf Water Potential, Tree Health, Plant Health, Tree Crops