Drone Collision Recovery System
Background
Unmanned aerial vehicle (UAVs) or drones are transforming search and rescue, surveillance, and commercial applications. Among UAVs, the four rotor drone or quadrotor has become the standard design. An integral part of UAV operation is collision avoidance. However, despite significant advances in this area, drones still remain vulnerable to collisions that may occur because of unreliable sensors or unpredictable disturbances. Often after a collision, a drone is unable to sustain flight and it must land to recover its flight path. A system to ensure continuous flight after a collision is desirable.
Brief Description
Prof. Konstantinos Karydis’ lab at the University of California, Riverside has developed a new active resilient quadrotor (ARQ), which incorporates passive springs within its frame to absorb shocks and survive collisions. Each arm of the quadrotor is equipped with sensors to accurately and rapidly detect the location (in the drone’s frame) and intensity of a collision. In addition, a recovery controller that enables the drone to sustain flight after collision with objects like wall, poles, or moving objects.
The technology has been proven on the quadrotor however it may be applied to drones with more than four arms.
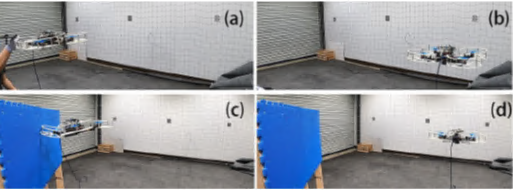
Fig 1: Instances of the novel ARQ drone detecting and recovering from colllisions in (a) and (b) and from collision with a wall (c) and (d).
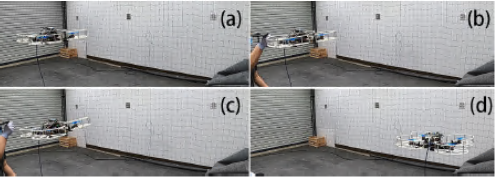
Fig 2: shows ARQ detecting and recovering from a passive collision. (a) ARQ hovers. (b) Collision starts and the ARQ arm absorbs the shock. (c) recovery control starts and there is a body interfering with the ARQ’s flight path. (d) ARQ is stabilized and hovering again.
Applications
- Commercial drone applications
- For use in search and rescue operations.
- May be used as a recreational device for hobbyists
Patent Status
| Country | Type | Number | Dated | Case |
| United States Of America | Published Application | 20230399124 | 12/14/2023 | 2021-810 |
Related Materials
Contact
- Venkata S. Krishnamurty
- venkata.krishnamurty@ucr.edu
- tel: View Phone Number.

Other Information
Keywords
drone, search and rescue, quadrotor, surveillance, unmanned aerial vehicle, UAV