A Novel Lockable Spring-Loaded Prismatic Spine To Support Agile Quadrupedal Locomotion
Full Description
Background
Quadruped robots are designed to move on four legs and have gained significant attention due to their versatility and potential applicability across industries. Existing quadrupedal platforms adopt a single, rigid body design - but these have limited agility both in terms of locomotion and maneuverability. Extending the morphological degrees of freedom (DoFs) may be the key to achieving more agile locomotion.
Technology
Inspired by vertebrate studies, the research team led by Prof. Karydis at UCR have advanced the locomotion capabilities of quadrupedal robots by developing a novel, spring-loaded, lockable spine modules and a new spinal compliance-integrated quadruped (SCIQ) platform. The unique locking mechansim allows the spine to switch between a rigid state for controlled motion and a compliant state for energy storage and release during actions like jumping.
Images
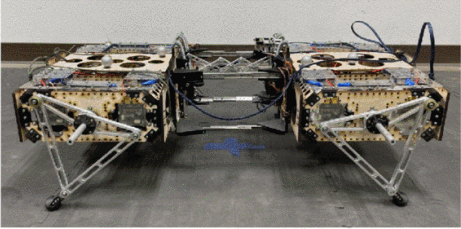
The SCIQ robot prototype with the lockable compliant prismatic spine in place.
The SCIQ robot design - (a) the robot assembly comprises one half-body, a spine module and the other half body; (b) each half-body consists of 2-DoF leg modules and a half-body trunk; (c) each leg module adopts a flat-symmetric servo layout and links to leg limbs via timing belts and co-axial shafts.
Advantages
- Enhanced agility through spinal compliance - enables dynamic and more efficient movements
- Lockable spine for versatile locomotion - allows for precise, low-speed movement and agile dynamic maneuvers
- Degressive spring for enhanced energy management - making the spine effective in absorbing the energy and efficiently releasing the energy
- Improved performance in challenging landings - improving the robots stability and robustness
- Platform for spine research
Suggested uses
Quadrupedal robots for applications in:
- Search and rescue
- Inspection and monitoring
- Surveillance and recon
- Agriculture
- Research platform to study animal locomotion
Inventor Information
- Watch a video demonstrating the invention
- Please review all inventions by Prof. Karydis and his team at UCR
- Please visit the Prof. Karydis's group website to learn more about their research at UCR
Related Materials
Patent Status
Patent Pending
Contact
- Venkata S. Krishnamurty
- venkata.krishnamurty@ucr.edu
- tel: View Phone Number.

Other Information
Keywords
quadruped robots, robot locomotion, compliant spine, motion control, search and rescue