Rear View Vehicle Classification Using Computer Vision
Background
Vehicle classification is important to autonomous navigation, traffic analysis, surveillance, security systems and transportation management. A common approach to vehicle classification utilizes a vision-based method, employing external physical features to detect and classify a vehicle in still images and video streams. Accomplishing this process with a computer is not simple. For a computer to successfully analyze and classify a vehicle using an automatic vehicle classification system, it would have to take into account a number of real world variables in order to classify the vehicle by using visual data.
Brief Description
Professor Bir Bhanu and colleagues at the University of California, Riverside, have developed a robust vehicle classification system based on video images from the rear-side view of a vehicle. This system classifies a vehicle into one of four classes: sedan, pick-up truck, SUV/minivan, and unknown. The system validates detected moving objects by a simple frame differencing approach.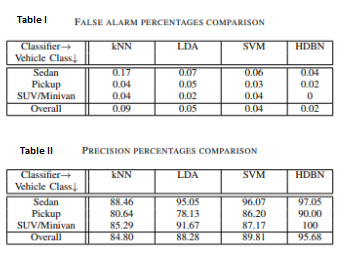
Table I shows the false alarm percentages over the different methods used to classify vehicles.
Table II
shows that the UCR method has the highest accuracy when compared to other known methods.
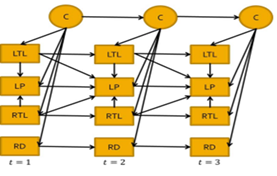
Figure 1 is the Dynamic Bayesian Network structure created by extracting data from surveillance. In conjunction with the car being spotted the Left Tail Light (LTL), License Plate (LP), Right Tail Light (RTL), and Rear Dimensions (RD) are identified simultaneously and set within the Dynamic Bayesian Network to accurately classify and identify the vehicle.
Suggested uses
- Classification of vehicles for identification and/or surveillance
Patent Status
| Country | Type | Number | Dated | Case |
| United States Of America | Issued Patent | 9,466,000 | 10/11/2016 | 2011-712 |
Related Materials
Contact
- Venkata S. Krishnamurty
- venkata.krishnamurty@ucr.edu
- tel: View Phone Number.

Other Information
Keywords
computer vision, vehicle classification